<noframes id="ycx27">
密碼找回
賬號找回
刪除信息
常見問題
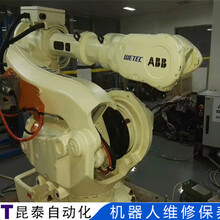
FD-B6歐地希OTC機器人維修保養(yǎng)講解
伯朗特SCARA機器人維修保養(yǎng)處理流程
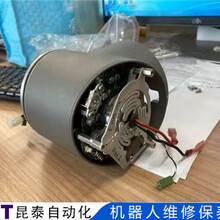
庫卡機器人伺服電機維修好處理
日本川崎機器人不能啟動維修閃屏
2年
微信在線
13961122002
日本安川工業(yè)機械手維修保養(yǎng)操作合理
¥486
優(yōu)傲機器人伺服電機維修選昆泰
SIASUN機器人按鍵不良維修溫度高
MOTOMAN-GP180-120安川YASKAWA機器人維修保養(yǎng)中心
鑫洋盛機器人不能啟動維修跳閘
韋森貝格機器人驅動板維修小竅門